[2020] 블록 이동하기
- 문제 설명
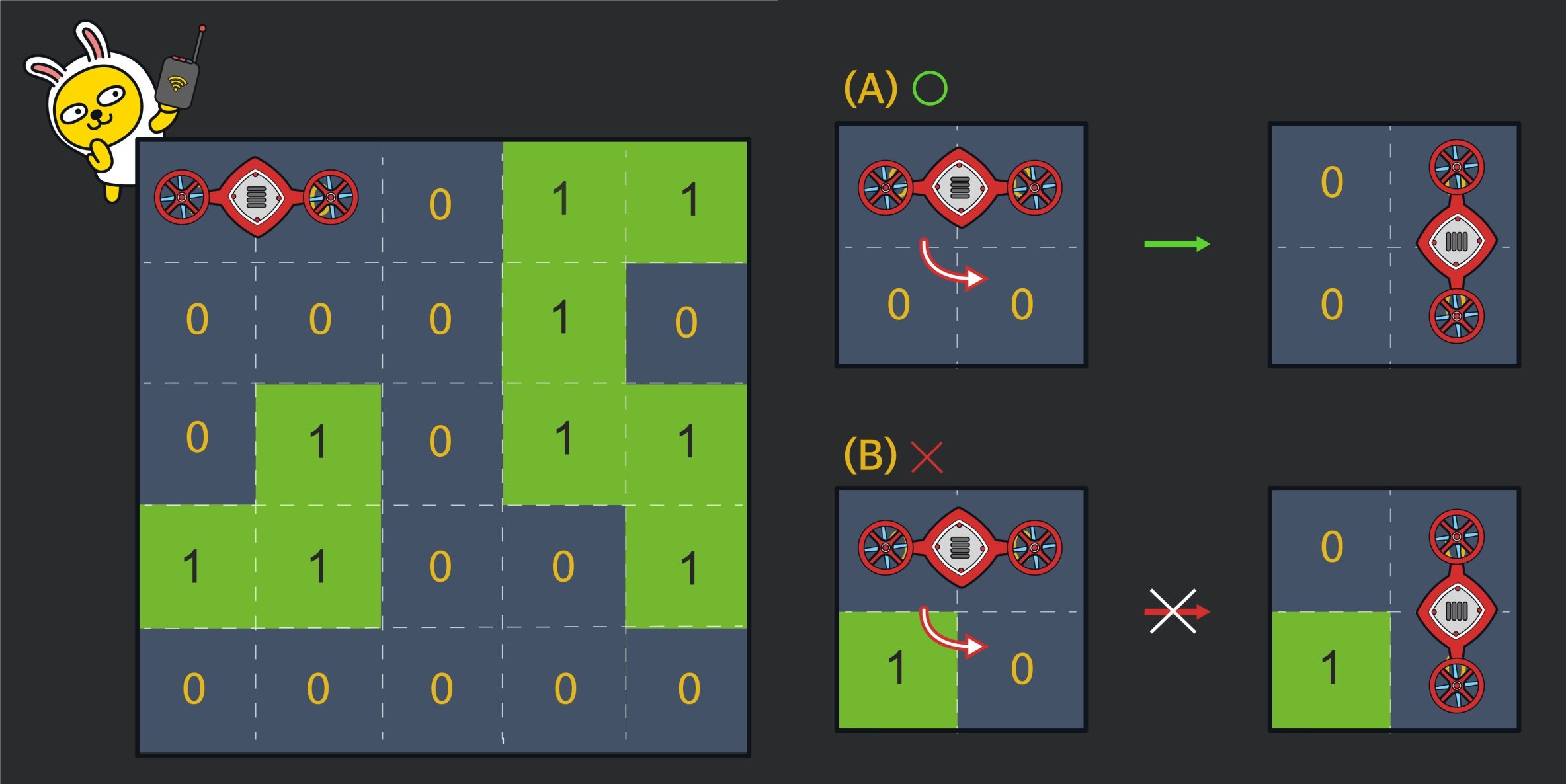
- 아래의 왼쪽과 같이 board의 정보가 input으로 주어진다.
- 0과 1로 이루어진 N x N 크기의 지도에서
2 x 1크기의 로봇을(1, 1)에서(N, N)까지 이동시킨다. - 시작은 아래의 왼쪽과 같이 시작한다.
- 로봇은 앞뒤 구분없이 움직일 수 있다.
- 로봇의 회전은 아래의 오른쪽과 같이 실행 할 수 있다.
- 로봇이 한칸 이동할 때 걸리는 시간은 1초이다.
- 90도 회전할 때 1초가 소요된다.
- 문제 풀이
-
기본적으로 탐색알고리즘은 다익스트라 알고리즘을 사용한다.
-
Memoization을 하기 위한 배열 visit을 생성한다
-
visit :: node
struct node { node() : left(false), right(false), top(false), bottom(false) {} //현재 위치와 왼쪽에 배치되어 있는가 bool left; //현재 위치와 오른쪽에 배치되어 있는가 bool right; //현재 위치와 위쪽에 배치되어 있는가 bool top; //현재 위치와 아래쪽에 배치되어 있는가 bool bottom; };- visit :: 검색 ```cpp //로봇이 가로로 있을 경우 if (pos.p1.x == pos.p2.x) { //로봇의 두 좌표가 visit 여부가 모두 false여야 진행한다. if (visit[pos.p1.x][pos.p1.y].left && visit[pos.p2.x][pos.p2.y].right) { continue; } visit[pos.p1.x][pos.p1.y].left = true; visit[pos.p2.x][pos.p2.y].right = true; state = 0; } //로봇이 세로로 있을 경우 else { //로봇의 두 좌표가 visit 여부가 모두 false여야 진행한다. if (visit[pos.p1.x][pos.p1.y].top && visit[pos.p2.x][pos.p2.y].bottom) { continue; } visit[pos.p1.x][pos.p1.y].top = true; visit[pos.p2.x][pos.p2.y].bottom = true; state = 1; }- 좌표를 저장하기 위한 point와 pointset 구조체를 만든다. - 시작 좌표를 기준으로 이동가능한 모든 좌표를 queue에 저장하고, 순차적으로 이동시켜 나아가 최적의 값을 구한다. -
#include <string>
#include <vector>
#include <queue>
using namespace std;
vector<vector<int>> B;
//for visit & memo
struct node
{
node() : left(false), right(false), top(false), bottom(false) {}
//현재 위치와 왼쪽에 배치되어 있는가
bool left;
//현재 위치와 오른쪽에 배치되어 있는가
bool right;
//현재 위치와 위쪽에 배치되어 있는가
bool top;
//현재 위치와 아래쪽에 배치되어 있는가
bool bottom;
};
struct point
{
point() : x(0), y(0) {}
int x;
int y;
void operator=(point a)
{
this->x = a.x;
this->y = a.y;
}
};
bool operator==(point a, point b)
{
if (a.x == b.x && a.y == b.y)
return true;
return false;
}
bool operator<(point a, point b)
{
if (a.x == b.x)
return a.y < b.y;
if (a.y == b.y)
return a.x < b.y;
}
struct pointset
{
point p1; //(n, n)과 상대적으로 가까운 것
point p2; //(n, n)과 상대적으로 먼 것
};
bool operator==(pointset a, pointset b)
{
if (a.p1 == b.p1 && a.p2 == b.p2)
return true;
if (a.p1 == b.p2 && a.p2 == b.p1)
return true;
return false;
}
struct W
{
//최소값을 구하기 위한 값을 지정한다.
int movecount;
pointset pos;
};
//왼쪽, 오른쪽, 위쪽, 아래쪽 각각 이동이 가능한지 판단
bool moveleft(pointset pos, int& n)
{
if (0 <= pos.p2.y - 1 && B[pos.p1.x][pos.p1.y - 1] == 0 && B[pos.p2.x][pos.p2.y - 1] == 0)
return true;
return false;
}
bool moveright(pointset pos, int& n)
{
if (pos.p1.y + 1 < n && B[pos.p1.x][pos.p1.y + 1] == 0 && B[pos.p2.x][pos.p2.y + 1] == 0)
return true;
return false;
}
bool moveup(pointset pos, int& n)
{
if (0 <= pos.p2.x - 1 && B[pos.p1.x - 1][pos.p1.y] == 0 && B[pos.p2.x - 1][pos.p2.y] == 0)
return true;
return false;
}
bool movedown(pointset pos, int& n)
{
if (pos.p1.x + 1 < n && B[pos.p1.x + 1][pos.p1.y] == 0 && B[pos.p2.x + 1][pos.p2.y] == 0)
return true;
return false;
}
//state
//가로로 있을 때 :: 0
//세로로 있을 때 :: 1
//rotate p1 forward :: p1을 기준으로 시계방향으로 회전이동한다.
//rotate p2 reverse :: p2를 기준으로 반시계방향으로 회전이동한다.
bool rotate_p1_forward(pointset pos, int& n, int state)
{
if (state == 0)
{
if (0 <= pos.p1.x - 1 && B[pos.p2.x - 1][pos.p2.y] == 0 && B[pos.p1.x - 1][pos.p1.y] == 0)
return true;
}
else
{
//p1, p2가 스왑되어 들어가야함
if (pos.p1.y + 1 < n && B[pos.p2.x][pos.p2.y + 1] == 0 && B[pos.p1.x][pos.p1.y + 1] == 0)
return true;
}
return false;
}
bool rotate_p1_reverse(pointset pos, int& n, int state)
{
if (state == 0)
{
//p1, p2가 스왑되어 들어가야함
if (pos.p1.x + 1 < n && B[pos.p2.x + 1][pos.p2.y] == 0 && B[pos.p1.x + 1][pos.p1.y] == 0)
return true;
}
else
{
if (0 <= pos.p1.y - 1 && B[pos.p2.x][pos.p2.y - 1] == 0 && B[pos.p1.x][pos.p1.y - 1] == 0)
return true;
}
return false;
}
bool rotate_p2_forward(pointset pos, int& n, int state)
{
if (state == 0)
{
if (pos.p2.x + 1 < n && B[pos.p1.x + 1][pos.p1.y] == 0 && B[pos.p2.x + 1][pos.p2.y] == 0)
return true;
}
else
{
//p1, p2가 스왑되어 들어가야함
if (0 <= pos.p2.y - 1 && B[pos.p1.x][pos.p1.y - 1] == 0 && B[pos.p2.x][pos.p2.y - 1] == 0)
return true;
}
return false;
}
bool rotate_p2_reverse(pointset pos, int& n, int state)
{
if (state == 0)
{
//p1, p2가 스왑되어 들어가야함
if (0 <= pos.p2.x - 1 && B[pos.p1.x - 1][pos.p1.y] == 0 && B[pos.p2.x - 1][pos.p2.y] == 0)
return true;
}
else
{
if (pos.p2.y + 1 < n && B[pos.p1.x][pos.p1.y + 1] == 0 && B[pos.p2.x][pos.p2.y + 1] == 0)
return true;
}
return false;
}
void Swap(point& a, point& b)
{
point tmp;
tmp = a;
a = b;
b = tmp;
}
int solution(vector<vector<int>> board)
{
int n = board.size();
vector<vector<node>> visit(n, vector<node>(n));
B = board;
//이동을 저장하기 위한 공간
queue<W> q;
pointset pos;
pos.p1.y = 1;
W pushing;
pushing.movecount = 0;
pushing.pos = pos;
q.push(pushing);
int ret = 0;
//다익스트라 알고리즘을 기반
while (!q.empty())
{
pos = q.front().pos;
ret = q.front().movecount;
q.pop();
//최초에 (n, n)에 도달한 movecount를 리턴한다.
if (pos.p1.x == (n - 1) && pos.p1.y == (n - 1))
{
return ret;
}
int state = -1;
//visit의 여부를 확인하여 이동 가능한 모든 구역을 조사
//조사 후에 queue에 넣는다
//가로로 있을 경우
if (pos.p1.x == pos.p2.x)
{
if (visit[pos.p1.x][pos.p1.y].left && visit[pos.p2.x][pos.p2.y].right)
{
continue;
}
visit[pos.p1.x][pos.p1.y].left = true;
visit[pos.p2.x][pos.p2.y].right = true;
state = 0;
}
//세로로 있을 경우
else
{
if (visit[pos.p1.x][pos.p1.y].top && visit[pos.p2.x][pos.p2.y].bottom)
{
continue;
}
visit[pos.p1.x][pos.p1.y].top = true;
visit[pos.p2.x][pos.p2.y].bottom = true;
state = 1;
}
//왼쪽, 오른쪽, 위쪽, 아래쪽 각각 이동이 가능하다면 이동한다.
if (moveleft(pos, n))
{
pushing.pos = pos;
pushing.pos.p1.y--;
pushing.pos.p2.y--;
pushing.movecount = ret + 1;
q.push(pushing);
}
if (moveright(pos, n))
{
pushing.pos = pos;
pushing.pos.p1.y++;
pushing.pos.p2.y++;
pushing.movecount = ret + 1;
q.push(pushing);
}
if (moveup(pos, n))
{
pushing.pos = pos;
pushing.pos.p1.x--;
pushing.pos.p2.x--;
pushing.movecount = ret + 1;
q.push(pushing);
}
if (movedown(pos, n))
{
pushing.pos = pos;
pushing.pos.p1.x++;
pushing.pos.p2.x++;
pushing.movecount = ret + 1;
q.push(pushing);
}
if (rotate_p1_forward(pos, n, state))
{
if (state == 0)
{
pushing.pos = pos;
pushing.pos.p2.x--;
pushing.pos.p2.y++;
pushing.movecount = ret + 1;
q.push(pushing);
}
else
{
//p1, p2가 스왑되어 들어간다.
//상대적으로 종료지점과 가까운 point를 p1으로 한다.
pushing.pos = pos;
pushing.pos.p2.x++;
pushing.pos.p2.y++;
Swap(pushing.pos.p1, pushing.pos.p2);
pushing.movecount = ret + 1;
q.push(pushing);
}
}
if (rotate_p1_reverse(pos, n, state))
{
if (state == 0)
{
//p1, p2가 스왑되어 들어간다.
//상대적으로 종료지점과 가까운 point를 p1으로 한다.
pushing.pos = pos;
pushing.pos.p2.x++;
pushing.pos.p2.y++;
Swap(pushing.pos.p1, pushing.pos.p2);
pushing.movecount = ret + 1;
q.push(pushing);
}
else
{
pushing.pos = pos;
pushing.pos.p2.x++;
pushing.pos.p2.y--;
pushing.movecount = ret + 1;
q.push(pushing);
}
}
if (rotate_p2_forward(pos, n, state))
{
if (state == 0)
{
pushing.pos = pos;
pushing.pos.p1.x++;
pushing.pos.p1.y--;
pushing.movecount = ret + 1;
q.push(pushing);
}
else
{
//p1, p2가 스왑되어 들어간다.
//상대적으로 종료지점과 가까운 point를 p1으로 한다.
pushing.pos = pos;
pushing.pos.p1.x--;
pushing.pos.p1.y--;
Swap(pushing.pos.p1, pushing.pos.p2);
pushing.movecount = ret + 1;
q.push(pushing);
}
}
if (rotate_p2_reverse(pos, n, state))
{
if (state == 0)
{
//p1, p2가 스왑되어 들어간다.
//상대적으로 종료지점과 가까운 point를 p1으로 한다.
pushing.pos = pos;
pushing.pos.p1.x--;
pushing.pos.p1.y--;
Swap(pushing.pos.p1, pushing.pos.p2);
pushing.movecount = ret + 1;
q.push(pushing);
}
else
{
pushing.pos = pos;
pushing.pos.p1.x--;
pushing.pos.p1.y++;
pushing.movecount = ret + 1;
q.push(pushing);
}
}
}
//도달하지 못하였을 경우 0을 리턴한다.
return 0;
}